Every year brings more processing power to all aspects of live sound. Modern loudspeaker processing routinely employs equalization, delay, crossovers, limiting and other advanced DSP processing techniques, such as FIR filters. DSP can be found in standalone processors, in amplifiers or built into powered speakers.
Yet with this ever-growing signal chain, let’s step back to review the operation of one component of the digital processing chain, namely the crossover. Crossovers were fundamental to the operation of loudspeakers well before the era of digital signal processing, and remain fundamental today. Let’s examine the basics of crossovers, how they influence speaker performance and details of how loudspeaker manufacturers go about selecting them.
What Is a Crossover?
The core of a loudspeaker crossover is a collection of “elements” capable of routing electrical signals to different loudspeaker transducers, with the intent of reproducing different frequency ranges in the most optimal manner. Crossovers exhibit two basic methods of operation that collectively direct the music’s electrical signal to the correct transducer.
The first type of operation is known as a lowpass filter. Lowpass filters operate as their name indicates. They allow lower frequencies to pass through easily, while impeding higher frequencies. The complement to the lowpass filter is termed a highpass filter. Highpass filters provides an easy path to higher frequencies, while impeding lower frequencies.
Crossovers are typically configured with multiple highpass and lowpass filters, or pairs of filters in sequence (i.e., a highpass followed by a lowpass). The same input signal feeds these filter groups, and each filter group provides a path for specific ranges of the input signal. These ranges of frequencies are, in turn, sent to the correct loudspeaker driver.
The elements of a crossover can take several forms. In passive loudspeakers, the elements are resistors, inductors (coils) and capacitors. These three core electrical components can be wired together in ways to create the frequency-dependent impediment to the electrical signal. For instance, a passive highpass filter has low resistance at high frequencies and an ever-growing resistance at lower frequencies. Another way of phrasing this is to say that a highpass filter has increasing impedance at low frequencies.
In an analog electronic crossover, the principles are the same as a passive filter, but instead we use different electronic building blocks (e.g., op-amps) to achieve the splitting of frequencies into different bands. DSP takes this one step further, with mathematical operations on the digitized signal producing a response that mirrors the filters built out of electronic bits.
Regardless of the method of construction, the specific details of how the filters function, or the ultimate frequency response of each electrical part of the crossover, the end result splits the incoming signal in a way that is best for each driver. To better understand why this is even necessary, we must consider the limitations of loudspeaker drivers.
Why a Crossover?
Simply stated, loudspeaker transducers are generally designed to provide great performance over a specific, narrow frequency band, rather than middling performance over the entire sonic spectrum. By tailoring transducers to reproduce specific ranges, and operating the drivers in their range of best performance, the overall loudspeaker system’s performance is increased.
The design considerations of individual drivers at low frequencies are somewhat intuitive. Larger driver cones can physically couple better to the air, and larger drivers generally have longer voice coils that allow more excursion (i.e., they can move farther in and out). Larger cones plus longer movement yields more low frequency output.
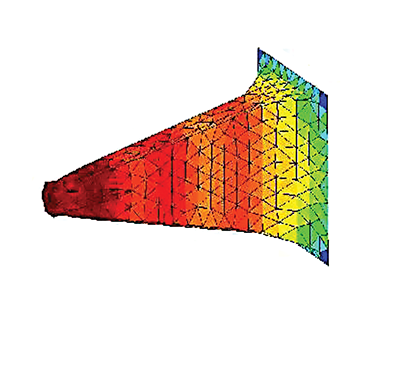
At low and mid frequencies, the wavelengths of sound are several feet long, bigger than the driver diameter. At 1kHz, the wavelength is about one foot. As the frequencies get higher, the driver’s dimensions become comparable to the wavelength of sound being reproduced. In this frequency realm, an interesting effect occurs where the driver’s coverage angle starts to narrow. As frequencies get higher, the driver becomes progressively more directional. Fig. 1 shows this effect graphically.
The driver in Fig. 1 becomes more directional because of the arrival time difference between sound that comes from different points on the speaker cone. Imagine standing off to the left of the loudspeaker driver and listening. Sounds from the left side of the speaker cone will arrive at you sooner than sounds from the right side of the speaker cone. This is because you are farther from the right side of the speaker cone than the left side.
At low- and midrange-frequencies, this difference in distance is of little effect. The wavelengths are very long, and therefore the relative phase difference of the arrivals is minimal. However, when the wavelengths become shorter, comparable to the dimensions of the cone, the phase difference grows higher and the directivity narrows. As an example, a six-inch difference in arrival at 100 Hz is only 16 degrees of phase shift, but that same distance is equal to 160 degrees at 1 kHz. As frequencies become higher, and therefore wavelengths shorter, the narrowing of directivity grows ever more pronounced. The response on axis is not retained as consistent coverage across the audience area.
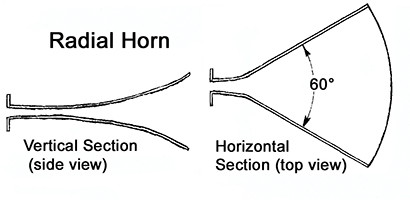
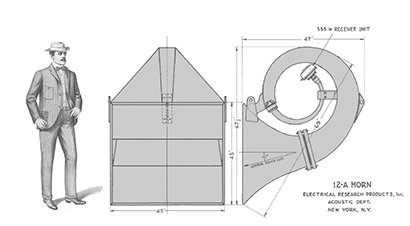
Driver limitations motivated the pro audio industry to move towards horn-loaded transducers to control and direct high frequencies, with cone transducers handling lower frequencies. The design parameters for cone loudspeakers and horn-loaded drivers are very different. Enter the crossover to distribute the higher frequencies to the horn driver, and the low frequencies to the cone LF driver.
Design Considerations
Unfortunately, crossover design is not as simple as merely building any filter that sends low frequencies to the low transducer(s) and high frequencies to the horn and driver. There are a number of variables in play that determine proper crossover function. Almost all crossovers have a transition that occurs over a range of frequencies, and that means there will be a collection of frequencies that both transducers are producing simultaneously. The crossover must be designed with a mindset for performance through this transition region.
An initial consideration is the operating range of the transducers. The transition from the woofer to the high frequency driver should take place in a range of frequencies where both drivers operate comfortably. A second consideration is selection of the crossover point so the directional response of the transducers match in the transition region. This is to ensure the directional response stays consistent through the frequencies. This means the loudspeaker engineer must understand both the loudspeaker’s directional behavior and the driver behavior at high output levels.
Once the appropriate frequency point for the crossover is determined, the designer must select the order and type of the crossover filters. The order of the crossover filter refers to how rapidly the sound transitions away from one driver to the other driver. The higher the crossover order, the more rapid this transition takes place, with a greater slope. A first-order filter provides a gradual slope of 6dB/octave; second-order is a steeper 12dB/oct; third-order at 18dB/oct; fourth at 24dB/oct, and so on. The type of crossover filter refers to the selection of certain mathematical coefficients that define the crossover frequency response and phase behavior near the crossover frequency.
It is important to note that the ultimate response at the crossover point is the sum of the driver’s response and the electrical crossover filter. The skilled crossover designer does not choose the electrical filter from a textbook, but rather designs a specific filter so that the driver and filter combination yields the desired target roll off response. Say the designer desires a fourth-order highpass response for the HF horn. Measuring the response of the horn by itself, the designer sees it naturally roll off as a second-order highpass filter. This means the electrical part of the crossover need only be second-order (2 + 2 = 4).
Even if the loudspeaker designer is very skilled and mates the drivers with differing coverage patterns in the best possible way, there remains the matter that the drivers are still separated a physical distance at the crossover frequency. As the listener moves in space with respect to the loudspeaker enclosure, it change the relative distance from each driver, and therefore the relative phase shift relationship between the drivers. The net result of this behavior is that the drivers will be more in phase at some angles to the enclosure than others. The physical separation between the drivers results in a narrowing of the coverage for the frequencies where both drivers are reproducing the signal. This narrowing is an unavoidable consequence of two spaced acoustic sources reproducing the same signal. It is in this region where the crossover filter type takes central stage.
.") The filter type influences the electrical phase of the filter through the transition range between the drivers. The highpass and lowpass filters both have their own phase responses, and those responses do not always mirror each other. Fig. 2 shows how the phase mis-alignment inherent in a Butterworth type crossover filter can cause the main direction of loudspeaker output to be tilted downwards at the crossover frequency. Note that this downward tilt only exists for the frequencies where both drivers are working together.
The filter type influences the electrical phase of the filter through the transition range between the drivers. The highpass and lowpass filters both have their own phase responses, and those responses do not always mirror each other. Fig. 2 shows how the phase mis-alignment inherent in a Butterworth type crossover filter can cause the main direction of loudspeaker output to be tilted downwards at the crossover frequency. Note that this downward tilt only exists for the frequencies where both drivers are working together.
In the 1970s, Siegfried Linkwitz and Russ Riley developed the Linkwitz-Riley (L-R) filter type. Unlike the Butterworth filter above, the L-R filter maintains the same relative phase between the highpass and lowpass filter through the crossover transition. Because of this matching phase, the main output of the loudspeaker remains oriented consistently through the crossover point, as shown in Fig. 3.
Most modern loudspeakers seek to match a L-R response curve through the crossover transition so that the directional response remains consistent. This means that the sum of the driver’s response and the electrical crossover will produce a L-R type behavior, but it does not necessarily mean that the electrical filter will be of the L-R type.
.") Conclusion
Conclusion
While it is tempting to want to out-engineer the original designers, hopefully this article demonstrates the several tradeoffs in play when striving to make transducers work in harmony. For instance, we’ve seen that pleasing changes in on-axis tonality from fiddling with a crossover might have disastrous consequences for evenness of coverage across the whole of the audience. These considerations become even more paramount when dealing with arrays of multiple loudspeaker cabinets.
Generally, if the reader is tempted to shape the tonality of their loudspeaker systems, this author recommends the careful application of equalization to the loudspeaker, and not modifying the manufacturer’s crossover selection. The manufacturer included many factors in the crossover selection, and the final electrical filter response may not be intuitive.
Manufacturers are increasingly abstracting their in-box loudspeaker processing away from the end user. This comes in the form of powered loudspeakers, dedicated processors, locked-down presets and speaker/amplifier combo packages. This is not a bad thing for the industry, as it improves system-to-system consistency and helps ensure that product will be utilized as the engineering team intended.
Phil Graham has been involved with crossover design for nearly 15 years. Email him at: [email protected].